- 지금까지 입력 벡터 \( {\bf x} \) 로부터 파라미터를 가지는 비선형 함수를 적용하여 출력 벡터 \( {\bf y} \) 를 만드는 신경망에 대해 살펴보았다.
- 앞서 최소 제곱법을 이용하여 다항식 커브 피팅 문제를 해결한 것처럼(1.1절) 여기서도 이런 형태로 에러 함수를 정의할 수 있다.
- 이제 이걸 확률 모델을 이용해서 식을 전개해보자.
- 이러한 확률적 해석은 네트워크 학습에 대한 일반적인 관점을 제공해주고,
- 풀려고하는 문제에 맞는 출력 함수와 에러 함수 선정 방식을 적절하게 설명할 수 있다.
회귀(Regression)
- 이제 신경망을 이용해서 3장에서 다루었던 회귀(regression) 문제를 풀어보도록 하자.
- 출력 값은 1차원의 실수 값으로 \( t \) 라고 표기했었다.
- 우리가 가정했던 사실은 \( t \) 가 \( x \) 에 종속적인 평균 값을 가지는 가우시안 분포를 따른다는 것이었다.
- 이를 수식으로 표현하면 다음과 같다.
- 여기서 \( \beta^{-1} \) 은 가우시안 노이즈의 정확도(precision)를 의미한다. (분산의 역수이다.)
- 지금까지 다 봤던 내용들이므로 후딱 후딱 넘기도록 하자.
- 가능도 함수(likelihood)를 구하기 위해 식을 설정하도록 한다.
- 입력값 : \( {\bf X}=({\bf x}_1,…,{\bf x}_N) \) 이고 서로 독립적으로 발현된다. ( i.i.d )
- 출력값 : \( {\bf t}={t_1,…,t_N} \) 이고 1차원 실수 값
- 음의 로그항을 이용하여 식을 전개하면 다음과 같은 에러 함수를 얻을 수 있다.
- 여기서 사용될 \( y \) 함수는 앞서 설명했다. (식 5.7 참고)
- 즉 2-layer 모델을 기준으로 식을 전개해 보도록 하자.
- 이후에 이 식을 이용하여 베이지언 방식을 이용한 풀이법을 설명할 것이지만, 우선은 MLE 방식을 설명한다.
- 사실 신경망에서는 로그 가능도 함수를 최대화하는 문제로 처리하는 방식보다 에러 함수를 최소화하는 문제로 처리하는 것이 일반적이다.
- 물론 가능도 함수를 최대화하는 문제나 에러 함수를 최소화하는 문제나 모두 동일한 식을 만들어내는 것은 이전 장에서도 다 보았던 것들이다.
- 따라서 회귀 문제를 푸는데 있어 가능도 함수가 아닌 에러 함수를 정의하고, 정의된 에러 함수로부터 가장 적합한 \( {\bf w} \) 를 구하는 문제로 진행하도록 해보자.
- 원래 하던대로 MLE 를 구하면 된다.
- 다만 신경망에서는 \( y({\bf x}, {\bf w}) \) 가 비선형이기 때문에 \( E({\bf w}) \) 가
nonconvex이다. - 이 말은 미분을 해도 전역 최소점을 찾을 수 없다는 의미이다.
- 다만 신경망에서는 \( y({\bf x}, {\bf w}) \) 가 비선형이기 때문에 \( E({\bf w}) \) 가
- 따라서 이를 구하는 문제는 에러 함수의 로컬 최소값(local minima) 형태로 구해지게 되는데 이건 5.2.1 절에서 설명하도록 하겠다.
- 우선 \( {\bf w}_{ML} \) 은 찾았다고 생각하고 \( \beta \) 를 구하는 식부터 좀 보자.
- 예전에 했던 방식대로 음로그 가능도 함수를 이용해서 구하면 된다.
- 예전에 구한 식과 차이가 없다.
- 만약 \( t \) 의 결과가 단일 차원이 아니라 벡터가 되면 어떻게 될까?
- 이것도 예전과 마찬가지로 노이즈는 각 차원에 독립적이고 동일한 값을 가진다고 가정하고 식을 전개하면 된다.
- 이 경우 최종 식도 거의 유사한 형태로 얻을 수 있게 된다.
- 여기서 \( K \) 는 타겟 값 벡터의 개수이다.
- 앞서 이야기한대로 회귀(regression) 문제에서 활성 함수는 identity 함수를 사용했으므로 \( y_k=a_k \) 가 성립한다.
- 즉, 회귀 문제는 함수 값 자체를 예측하는 문제이므로 활성 함수 \( f(\cdot)={\bf x} \) 였었다.
- 따라서 다음과 같은 식이 성립함을 알 수 있다.
- 조금 뜬금없다 싶지만 이후에 Backpropergation 문제를 다룰 때 등장하므로 여기서 한번 눈에 익혀두면 좋다.
이진분류
- 이제 이진 분류의 문제를 살펴보도록 하자. (즉, classification 문제이다.)
- 앞 장에서 보았듯이 이진 분류 문제에서는 활성 함수로 시그모이드와 같은 함수들이 사용된다.
- 위의 식을 사용하면 \( 0\le y({\bf x}, {\bf w}) \le 1 \) 의 결과를 얻게 된다.
- 이진 문제이므로 \( p(C_1|{\bf x}) \) 와 \( p(C_2|{\bf x}) \) 를 표현해야 하는데 당연히 \( y \) 와 \( 1-y \) 로 사용한다.
- 이 식은 베르누이 프로세스와 동일하므로 다음과 같이 하나의 식으로 표현 가능하다.
- 모든 관찰 데이터는 독립적으로 발생한다고 가정하므로 에러 함수를 최소 제곱법이 아닌 음의 로그 가능도 함수로 정의하면 된다.
- 이를 크로스 엔트로피 (cross-entropy) 라고 한다. 3장에서 소개한 내용이다.
- 분류 문제에서는 노이즈 정확도인 \( \beta \) 와 같은 요소는 없다.
- 왜냐하면 관찰 데이터에 이미 명확한 레이블(label) 타겟 값이 결정되어 제공되기 때문이다.
- 물론 레이블(lebel)이 잘못 표기된 데이터가 존재할 수도 있는 법이다.
- 뭐, 사실 이런 경우에도 쉽게 확장 가능하기는 하다. 더 이상 깊게 다루지는 않는다.
- 위의 수식에서는 cross-entropy 를 이용했는데, 사실 sum-of-squares 를 사용해도 상관은 없다고 한다.
- 다만 Simard 가 쓴 논문에 따르면 cross-entropy 가 학습 속도도 더 빠르고 일반화 성능도 더 좋다고 한다.
- 3장에서도 살펴보았지만 최종 출력 결과를 \( K \) 개의 이진 분류기를 이용해서 다분류기를 만들 수 있다.
- 이 경우는 최종 출력 결과가 각각의 시그모이드 활성 함수를 가진 \( K \) 개의 출력 노드로 생각할 수 있다.
- 이 때의 확률 모델은 다음과 같이 기술할 수 있다.
- 이제 cross-entropy 모델을 적용한다. 따라서 음로그 가능도 함수를 에러 함수로 정의한다.
- 여기서 \( y_{nk} \) 는 \( y_{nk}=y_k({\bf x}_n, {\bf w}) \) 이다.
- 마찬가지로 이 함수를 출력값으로 미분한 식은 어떻게 될까?
- 오, 회귀 문제나 분류 문제나 에러 함수를 출력값으로 미분한 값은 동일한 결과가 나온다는 것을 알 수 있다.
-
마찬가지로 여기서도 간단하게 이런 사실만 알고 넘어가도록 하자. 뒤에서 다시 나온다.
- 신경망이 일반적인 선형 분류식과 다른점이 뭘까?
- 지금까지 살펴본 신경망에서 첫번째 레이어에 속한 가중치 \( {\bf w} \) 가 여러 출력값(말단)들 사이에서 다양하게 공유된다는 것을 알 수 있다.
- 즉, 수식 내에서 보면 하나의 히든 노드가 최종 출력 값에 다양한 가중치를 통해 영향을 미치고 있음을 알 수 있다.
- 선형 분류기의 경우 이러한 요소들이 모두 독립적으로 적용되고 있는 것과 마찬가지.
- 첫번째 레이어에서 이루어지는 작업은 사실 비선형 속성 선택(feature selection)을 의미하게 된다.
- 따라서 좋은 자질을 가지고 있는 속성을 취하는 것이 된다.
- 서로 다른 출력에 대해 Feature가 공유되어 일반화 측면에 유리하다. (그런데 왜인지는 딱히 감이 오지를 않네.)
- 지금까지 살펴본 신경망에서 첫번째 레이어에 속한 가중치 \( {\bf w} \) 가 여러 출력값(말단)들 사이에서 다양하게 공유된다는 것을 알 수 있다.
다중분류
- 이제 최종적으로 다중 분류식을 보자.
- 입력 데이터는 \( K \) 개의 서로 다른 클래스 중 하나에 속하게 된다.
- 이전에 다루었던 1-of-K 방식을 사용한다.
- 이를 이용한 일반화된 에러 함수는 다음과 같다.
- 즉 \( K \) 개의 출력 값에 대한 에러 값을 모두 합산하는 형태
- 이 때 \( y_k({\bf x}, {\bf w}) = p(t_k=1|{\bf x}) \) 이다.
- 사실 4장에서 다루었던 방식으로, 최종적으로 소프트맥스(soft-max) 함수를 얻게 된다.
- 이제 재미난 성질을 좀 보자. 위의 식에서 \( a_k \) 영역에 어떤 상수를 더해도 이 식은 항상 성립하게 되는데,
- 위와 같은 성질이 있기 때문이다.
- 따라서 위의 식에 대입하여 \( a_k \) 항에 특정 상수를 더하더라도 분자, 분모가 서로 약분되어 상수항은 사라지게 된다.
- 결국 \( a_k \) 에 어떤 상수를 더해도 최종 식 \( y_k \) 는 변하지 않기 때문에 에러 함수는 \( {\bf w} \) 공간에서 특정 방향으로는 상수가 된다.
- 이게 무슨말이가 싶지만 다음을 기악해보자.
- 이를 막기위해 정칙화(regularaition)를 도입해야 한다. (당연히 뒤에 나온다.)
- 마지막으로 에러 함수를 \( a_k \) 로 미분한 값을 알아보자.
- 역시나 처음에 봤던 식이 나왔다.
- 이번 절이 주는 교훈은 아주 명확하다.
- 풀고 싶은 문제(즉, 회귀, 이진, 다중분류)에 따라 에러 함수를 다르게 정의하지만,
- \( a_k \) 에 대한 에러 함수의 미분 값은 \( y_k-t_k \) 로 모두 동일하다.
- 이후에 중요하게 사용되므로 꼭 기억하자.
5.2.1 모수 최적화 (Parameter optimization)
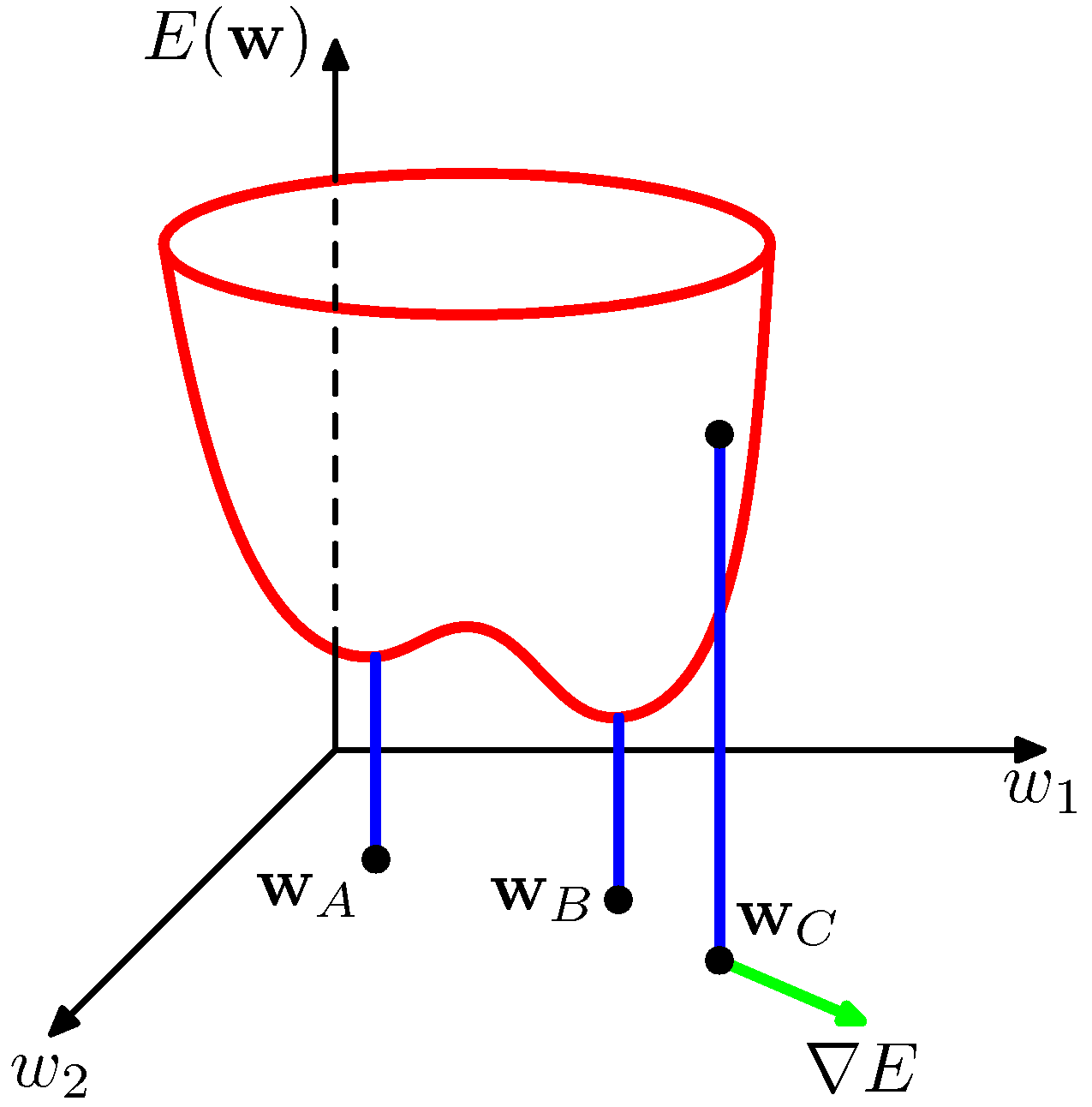
- 다음 단계로 어떻게 에러 함수 \( E({\bf w}) \) 를 최소화하는 벡터 \( {\bf w} \) 를 찾을 수 있는지 확인해보자.
- 위의 그림을 보면 임의의 한 점 \( {\bf w}_C \) 에서 미분한 벡터의 방향이 \( \nabla E \) 임을 알 수 있다.
- 임의의 한 점 \( {\bf w} \) 에서 약간 떨어진 곳을 \( {\bf w}+\delta{\bf w} \) 라고 하면,
- \( \delta E \simeq \delta{\bf w}^T\nabla E({\bf w}) \) 라고 할 수 있다.
- 에러 함수는 미분 가능하므로 최소값은 당연히 Gradient 가 없어지는 지점에서 나타나게 된다. ( \( \nabla E=0 \) )
- 그 외에는 \( -\nabla E({\bf w}) \) 방향으로 조금씩 이동하면 된다.
- 에러 함수는 비선형 함수에 종속되기 때문에 Gradient 값이 0이 되는 지점이 무척이나 많을 수 있다.
- 이런 지점을 지역 최소점(Local Minimum) 이라고 하고, 이 중 가장 작은 값을 가지는 지점을 전역 최소점(Global Minimum) 이라고 한다.
- 학습의 최종 목적은 전역 최소점(Global Minimum)을 찾는 것이지만 현실적으로 정확한 값을 찾기 어렵기 때문에 몇 개의 지역 최소점(Local Miminum)을 찾아 이 중 가장 작은 값을 가지는 지점을 정답으로 간주한다.
- 비선형 연속 함수의 최적화 문제에서 가중치를 구하기 위한 방법은 다음과 같다.
- (1) 초기값 \( {\bf w} \) 를 정하고,
- (2) 가중치 공간 내에서 특정 형태의 반복 식을 통해 찾고자 하는 위치를 계속 변경한다.
- (3) 목적함수에 좀 더 부합되는 \( {\bf w} \) 를 업데이트하고 이를 계속 반복함.
- 여기서 \( \tau \) 는 반복 스텝을 의미한다.
- 많은 경우에 Gradient 방식을 이용하여 값을 갱신하게 된다.
- Gradient 방식의 중요성을 이해하기 위해 테일러 급수라를 이용한 에러 함수 근사 방법을 확인해 보는 것도 좋다.
5.2.2. 지역 이차형식 근사 (local quadratic approximation)
- 임의의 한 점에서의 함수를 근사하기 위한 여러 방법이 존재하는데,
- 이 중 테일러 급수를 이용한 함수 근사는 매우 유명함.
- 간단하게 테일러 급수를 이용한 함수 근사식을 확인해보자. 아래가 테일러 급수이다.
- 물론 간단하게 표기할 수도 있다.
- 보시다시피 한 점 \( a \) 에서 함수 식을 근사하게 된다.
- 차수가 계속 증가할수록 한 점에서의 근사 값이 더 정확해지지만, 계산량이 너무 많아진다.
- 이제 이 식을 이용해서 에러 함수를 근사해보자.
- 물론 차수를 무한히 늘릴 수 없으므로 2차까지만 확장한다. (좀 심한 가정 아닌가?)
-
여기서 못 보던 값인 \( {\bf b} \) 와 \( {\bf H} \) 가 등장했다.
-
\( {\bf b} \) 는 \( {\bf \widehat{w} } \) 일 때의 \( E \) 의 Gradient 값이다.
-
\( {\bf H} \) 는 헤시안(Hessian) 행렬이라고 부른다. ( \( {\bf H}=\nabla\nabla E \))
- 이걸 최초의 식에 대입하며 풀면 다음의 식을 얻을 수 있다.
- 만약 \( {\bf w} \) 가 \( {\bf \widehat{w} } \) 에 충분히 가깝게 접근하면 위의 식은 꽤나 적절한 근사 식으로 생각할 수 있다.
- 자, 이제 특정 지점에서 이차 형식의 근사 식이 에러 함수를 최소화 하는 지역 최적점이라고 가정해보자.
- 그럼 \( \nabla E=0 \) 을 만족할 것이고 이 때의 \( {\bf w} \) 를 \( {\bf w}^* \) 라고 하면,
- 이 때 헤시안 행렬 \( {\bf H} \) 는 \( {\bf w}^* \) 에 대해 얻어진 행렬이 된다.
- 이 함수가 기하학적으로 어떠한 모양을 가지게 되는지 분석하기 위해 헤시안 행렬에 대한 식을 잠시 전개해 보자.
- 헤시안 행렬은 대칭 행렬이다. (선형대수 책 참고)
- 따라서 대칭 행렬이 가지는 특징을 그대로 가지게 되는데 이는 고유 벡터와 많은 관련이 있다.
- 위의 식은 정방 대칭 행렬에서의 고유 벡터 식을 표현한 것이다.
- 여기서 \( {\bf u}_i \) 가 고유 벡터가 된다. 대칭 행렬에 대해 생성되는 고유 벡터끼리는 서로 직교(orthonormal)하므로,
- 위와 같은 형태로 기술할 수 있다.
- 근데 사실 위의 \( \delta \) 가 정확하게 뭘 의미하는지 모르겠다.
- \( i \neq j \) 인 경우 0, \( i = j \) 인 경우 1인 식을 의미하는 건가? (이거 같다.)
- \( {\bf x}^T{\bf H}{\bf x} \) 와 같은 형태는 선형 대수 책에 많이도 나오는 형태이다.
- 여기서는 \( ({\bf w}-{\bf w}^*) \) 가 헤시안 행렬 좌, 우로 오는 것을 알 수 있다. 이 벡터는 기저 벡터로 표현이 가능한데,
- 고유 벡터가 orthonormal 하므로 고유 벡터를 기저 벡터로 사용 가능하다.
- 위의 식이 가능한 이유는 \( {\bf u}_i \) 가 단위 기저 벡터가 되기 때문에 표현 공간 내에서 임의의 한 벡터를 벡터를 기저 벡터의 선형 합으로 표현 가능하기 때문.
- 여기서 \( \alpha \) 는 일정한 크기의 상수이다.
- 이와 관련된 내용은 선형 대수 책을 참고하면 대부분의 교재에서 나오는 내용이다.
- 최종 식은 다음과 같이 기술할 수 있다.
- 헤시안 행렬 \( {\bf H} \) 이 양의 정부호 행렬(positive definite) 이 되기 위한 필요 충분 조건(i.f.f)은 다음과 같다.
- 왜 헤시안 행렬이 양의 정부호 행렬이 되어야 하는 것일까?
- 양의 정부호 행렬이어야만 극소값을 가지게 된다.
- 그 외에는 새들 포인트가 되거나 극대값이 되어버림.
- 이 때 고유 벡터는 기저 벡터가 되기 때문에 고유 벡터로 임의의 벡터를 표현 가능하다.
- 따라서 임의의 벡터 \( {\bf v} \) 를 다음과 같이 표기 가능하다.
- 따라서 다음의 식을 얻게 된다.
- 그리고 \( {\bf H} \) 가 양의 정부호 행렬이 되기 위한 필요 충분조건으로 고유 값이 모두 양수( \)>0 \)) 여야 한다.
- 이건 양의 정부호 행렬의 필요 충분 조건이 된다.
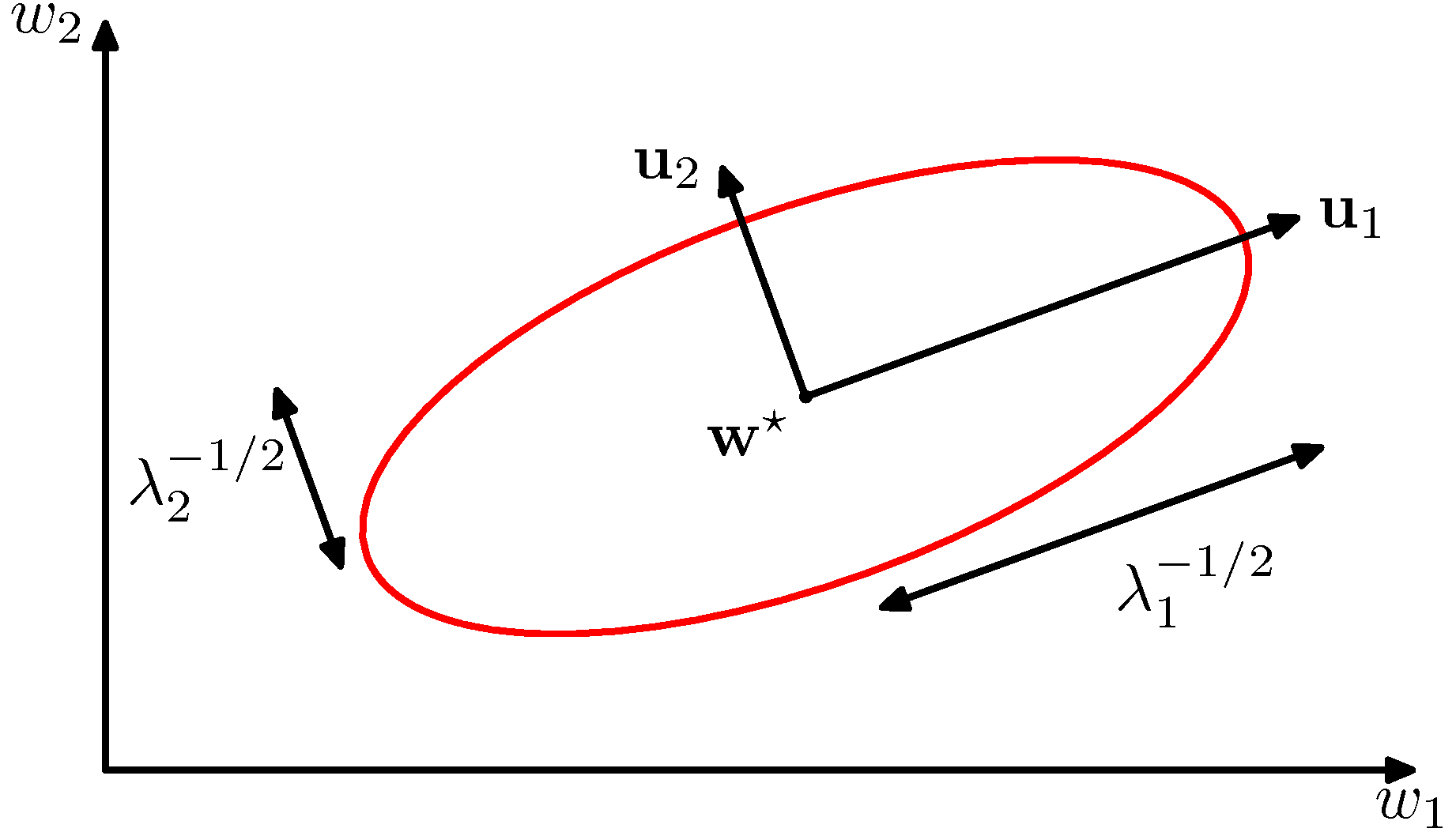
- 새로운 좌표 축에서 고유 벡터를 이용해 에러 함수를 표현한 그림은 다음과 같다.
- 사실 이거 많이 본 그림이다.
- 양의 정부호 행렬을 가져야만 타원형의 결과를 얻을 수 있다.
- 에러 함수는 최소 값인 \( {\bf w}^* \) 을 중심으로 가지는 이차 형식의 함수로 정의될 수 있다. 이는 결국 타원이 된다.
- 붉은색 선은 동일한 에러 값을 가지는 위치이며, 타원체를 기준으로 고유 벡터로는 타원의 방향을, 고유값으로는 타원의 퍼짐을 알 수 있다.
- \( {\bf w}^* \) 근처의 어떠한 값도 모두 \( E({\bf w}^*) \) 보다는 큰 값을 가지게 된다.
- \( \lambda \) 값이 양수이므로 양의 상수가 에러 값에 추가되게 된다.
- \( \lambda \) 는 아까 말했듯 타원을 만드려면 양수가 되어야 함.
- 어쨌거나 극소값을 가지기 위한 조건으로 1차식인 경우 아래 식을 만족해야 한다.
- 이를 확장하여 \( D \) 차원의 경우에는 헤시안 행렬이 양의 정부호 행렬이 되어야 한다. (극소값을 가지기 위해)
5.2.3 그라디언트 정보 사용하기 (Use of gradient information)
- 우리는 이후에 역전파 알고리즘(backpropagation)을 사용하기 위해 에러 함수의 경사도(gradient)를 구하는 식을 사용하는 것을 보게 될 것이다.
- 경사도라는 말은 좀 어색하므로 앞으로는 그냥 그라디언트라고 표기할 것이다.
- 이후에 역전파 알고리즘으로 에러 함수의 그라디언트를 효율적으로 평가 가능하다. (뒤에서 보자.)
- 에러 함수를 이차 형식(quadratic)의 근사 식으로 표현한 식을 다시 한번 생각해보자.
- 여기서 얻어야할 요소들은 \( {\bf b} \) 와 \( {\bf H} \) 이고 이들은 총 \( W(W+3)/2 \) 개의 파라미터로 이루어져 있다.
- 헤시안 행렬은 대칭 행렬이므로 위와 같은 개수가 나온다.
- 여기서 \( W \) 는 벡터 \( {\bf w} \) 의 차수를 의미한다.
- 여기서 지역 최소점은 이 이차 형식의 최소점이 되고 따라서 이 때의 연산량은 \( O(W^2) \) 에 영향을 받게 된다. (이차식이기 때문)
- 에러 값을 구할 때 \( O(W^2) \) 만큼의 연산이 들어간다고 생각하면 된다.
- 따라서 함수를 평가하기 위해서 \( O(W^2) \) 만큼의 비용이 들고,
- 이러한 평가를 각각의 \( {\bf w} \) 요소에 대해 변경을 해보면서 수행해야 하므로 \( O(W) \) 의 비용이 든다.
- 따라서 전체 필요한 비용은 \( O(W^3) \) 이 된다.
- 하지만 그라디언트 정보를 사용하게 되면 어떻게 될까?
- \( W \) 개의 가중치에 대해 이미 \( \nabla E \) 값이 존재한다고 하면 그냥 \( O(W) \) 로 데이터를 갱신할 수 있다.
- 마찬가지로 backpropergation 알고리즘을 사용하게 되면 \( \nabla E \) 를 구하는데 \( O(W) \) 의 비용이 들어간다.
- 총 \( O(W^2) \) 으로 계산을 끝마칠 수 있다.
5.2.4 그라디언트 감소 최적화 (Gradient descent optimication)
Batch Method
- 가장 손쉬운 접근법은 가중치를 업데이트할 때 에러 함수의 그라디언트를 사용하는 것.
- 이 때 \( \eta > 0 \) 을 만족해야 하며 \( \eta \) 는 학습률(learning rate) 이라고 한다.
- 관찰 데이터를 한번에 사용해서 가중치를 갱신하는 방식을 batch 방식이라고 하며 가중치 갱신 작업이 진행되는 동안 에러 함수 값을 가장 작게 만드는 방향으로 가중치 벡터가 갱신되게 된다.
- 이를 gradient descent 또는 steepest descent 라고 부른다.
- 하지만 실제로 성능은 그리 좋지 못하다.
- 많은 경우 conjugate gradients 와 같은 방식이나 quasi-Newton 방법을 이용하여 batch 방식을 사용한다.
- 실제 이러한 방식이 더 좋은 성능을 내는 것으로 알려져 있다. (빠른 속도와 더 간단한 그라디언트 함수 사용)
- 앞서 설명한데로 에러 함수를 그라디언트 방식으로 접근하는 경우에 전역 최소점이 아닌 지역 최소점을 찾게 된다.
- 따라서 랜덤하게 초기값을 지정한 뒤에 가급적 여러 번 작업을 반복하여 가장 최소가 되는 지점을 선택하여 사용하면 된다.
On-line Method
- 배치 모드가 아닌 데이터를 하나씩 업데이트하는 방식도 있다.
- 이를 on-line 방식이라고 한다.
- 실제로 성능도 좋고 많은 데이터를 처리하기에 적합한 방식이다.
- 이제 각각의 독립된 관찰 데이터를 이용하여 에러 함수를 정의하여 보자.
- on-line gradient descent 방식을 sequential gradient descent 또는 stochastic gradient descent 라고도 부른다.
- 가중치에 대한 갱신은 다음과 같은 방식을 사용한다.
- 입력 데이터를 순차적으로 입력하면서 반복을 수행할 수도 있고 임의로 데이터를 선택해가며 반복을 수행할 수도 있다.
- 일정 크기의 부분 집합 데이터를 기본 단위로 하여 처리하는 mini-batch 방식을 사용할 수도 있다.
- 온라인 업데이트 방식의 장점은 redundancy 에 있다.
- 만약 입력 데이터를 그대로 복사해서 2배의 크기로 만들어 학습을 한다고 해보자.
- 이럴 경우 배치 모드는 2배의 연산 비용이 들어간다.
- 하지만 온라인 업데이트 방식은 동일한 비용이 들어간다.
- 또 다른 장점은 지역 최소점을 탈출할 가능성에 있다.
- \( E_n({\bf w}) \) 의 stationary 지점은 \( \nabla E({\bf w}) \) 의 stationary 지점과 다르기 때문에 지역 최소점을 벗어날 수 있는 여지가 생긴다