튜링 머신 (Turing Machine)
- 튜링 머신(Turing machine)은 긴 테이프에 쓰여있는 여러 가지 기호들을 일정한 규칙에 따라 바꾸는 기계를 의미.
- 엘런 튜링이 제안한 머신으로 현대 컴퓨터의 초안이 됨.
- 이 논문은 뉴럴 튜링 머신 (Neural Turing Machine) 을 다루고 있기 때문에 당연히 먼저 튜링 머신을 알아야 한다.
튜링 머신의 이해
- 튜링 머신은 “계산 가능한 수에 대해, 수리 명제 자동 생성 문제의 응용” 이란 엘런 튜링의 논문에서 언급되었다.
- 이 논문이 나요게 된 배경부터 살펴보자.
- 1928년. 당시 수학계를 이끌던 다비트 힐베르트 (David Hilbert) 는 다음과 같은 의문을 제시하였다.
- 수학자들이 지금까지 해 왔던 일들을 정리해보니 몇 가지 추론 법칙을 조합하여 원하는 결과를 도출하는 것이 전부임.
- 그렇다면 몇 개의 추론 규칙을 제시하면 앞으로 수학자들이 증명할 명제 또한 모두 찾을 수 있지 않을까?
- 즉, 모든 수리 명제를 자동으로 만들어 낼 날이 올 수도 있겠구나.
- 힐베르트는 이러한 보편 규칙이 존재하는가에 대한 의문을 제시했다.
- 하지만 3년 후 독일의 신참 수학자 쿠르트 괴텔이 이는 불가능한 일임을 증명해버렸다.
- “기계적인 방식만으로는 수학의 모든 사실을 구성할 수 없다.”
- 이를 불완전성의 정리 (incompleteness theorem) 라 한다.
- 예를 들어 정수 무한대(\(\infty\))와 실수 무한대(\(\infty\))는 둘 다 무한대이지만 실수 무한대가 더 큰 범위.
- 이러한 성질을 이용하면 카운터 예제를 만들어낼 수 있다고 한다. (정확한 내용은 잘 모르겠다.)
- 켐브릿지 대학을 갓 졸업한 앨런 튜링은 졸업 후 맥스 뉴먼의 강의에서 이를 증명하는 리뷰 수업을 듣게 된다.
- 그리고 곧바로 튜링은 자신만의 방식으로 괴텔의 논리를 증명하고자 했다.
- 튜링이 증명한 방식
- ‘기계적인 방식’이 무엇인지 정의하고 이를 구현하기 위한 보편 기계를 정의한다. (오로지 5개의 부품으로)
- 그리고 이 기계가 충분히 보편적이라는 것을 증명한다.
- 여러가지 문제들을 제시하고 공통의 풀이 방식으로 해결한다.
- 마지막으로 이 기계로도 풀 수 없는 수학적 문제들을 제시하여 괴텔의 증명을 확인한다.
- 예를 들어 앞서 설명한 카운터 예제 등은 보편 기계에서는 종료(halt)에 도달하지 못하는 상태가 되어 버린다.
- 그런데 사람들은 정작 보편 기계에 관심을 가지게 됨.
- 생각보다 현실적인 문제들을 해결할 수 있는 수단을 제공하고 있다.
- 튜링은 이 머신에 A-Machine 이란 이름을 붙였는데 이후 튜링 머신이 된다.
- 물론 튜링이 제시한 보편 기계는 당시에는 실제 동작하는 기계라기보단 개념에 가까웠음.
- 사실 튜링 머신은 우리가 알고 있는 오토마타의 일종일 뿐이다.
- 튜링 머신 구성 요소
- 테이프 (tape) : 일정한 크기의 Cell 로 나뉘어 있는 종이 테이프로 무한하다. (사실은 무한하다는 것 자체가 말이 안되긴 한다.)
- 헤드 (head) : 종이 테이프의 특정한 셀을 읽을 수 있는 헤드로 이동이 가능. (or 헤드가 고정되고 테이프가 움직여도 된다.)
- 상태 기록기 (state register) : 현재 튜링 머신의 상태를 저장
- start state : 시작 상태 (상태 기록기가 초기화된 상태)
- halt state : 작업 수행이 종료된 상태
- 액션 테이블 : 특정 상태에서 특적 기호를 읽었을 때 수행해야 할 행동을 지시하는 테이블
- (예) 종이 테이프의 기호를 고치거나 지울 수 있다.
- (예) 헤드를 오른쪽 또는 왼쪽으로 한칸 움직이거나 그냥 그 자리에 머문다.
- (예) 상태 정보를 갱신한다. 혹은 그 상태 그대로 머물 수도 있다.
- 테이프를 제외하고는 튜링 머신에 사용되는 상태와 액션 테이블은 유한한 크기를 가져야 한다.
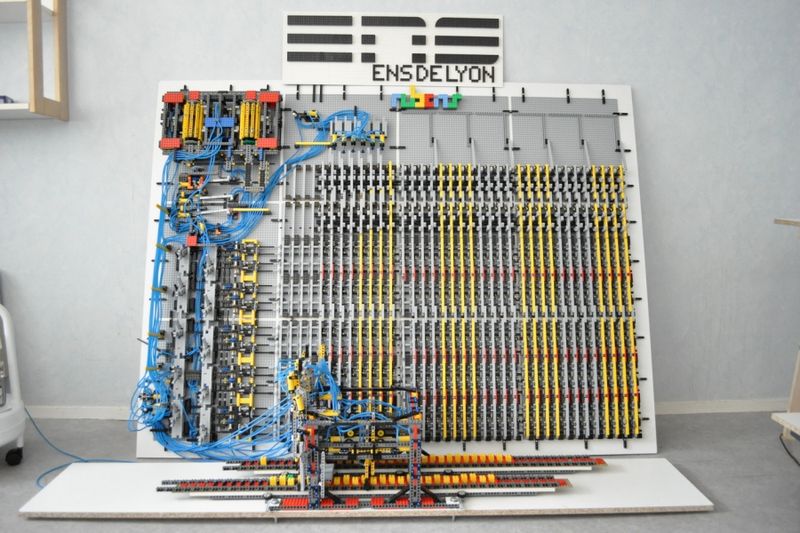
- 많은 사람들이 취미로 튜링 머신을 구현한다.

- 레고로도 만듬.
Turing Machine Example
- 예를 통해 튜링 머신이 어떻게 동작하는지를 살펴보자.
- 아래 그림은 앞서 설명한 튜링 머신 구성 요소들을 그림으로 나타낸것이다.
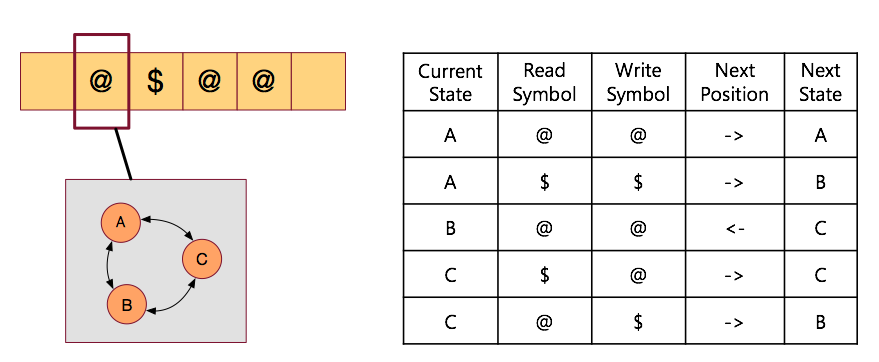
- 위 튜링 머신은 \($\) 문자열을 맨 뒤로 옮기는 작업을 수행하는 튜링 머신이다.
- 이처럼 튜링 머신은 어떤 목적을 해결하기 위한 수단으로 작성된다.
- 이 때 사용되는 요소는 테이프, 헤드, 상태, 액션테이블 등이다.
- 그림에서 보면,
- 왼쪽 상단은 테이프를 의미한다. 여기에 데이터를 읽고 쓸 수 있다.
- 붉은 색 박스가 헤드(head)가 된다. 이를 움직여 테이프 위치를 지정할 수 있다.
- 왼쪽 하단의 박스가 상태(state)를 나타내는 상자이다. 현재 \(\{A, B, C\}\) 중 하나의 상태에 매핑될 수 있다.
- 오른쪽이 액션 테이블로 각 상태에서 전이 가능한 행동들이 기술되어 있다.
- 이 테이블을 어떻게 작성하는가에 따라 우리가 해결해야 할 문제를 처리할 수 있음을 쉽게 알 수 있다.
- 그림만 봐도 대충 느낌이 오는데 그냥 전형적인 오토마타이다.
- 사실 현재 상태가 어떤 상태인지도 어딘가에 저장을 하고 있어야 하는데,
- 이것도 사실 테이프에 기록 가능하다.
- 현재 상태를 읽고 쓰는 방식도 마찬가지로 액션 테이블에 정의하고 테이프에 기록하면 된다.
- 감이 좀 올텐데 예를 들면 복사(copy)라던가 산술 연산 등을 오토마타로 구성할 수 있다.
- 이를 이용하여 실제 동작을 수행하는 튜링 머신을 구축할 수 있다.
Neural Turing Machine
- 이제부터는 뉴럴 튜링 머신을 살펴볼 것이다.
Introduction
- 컴퓨터 프로그램은 다음 3가지 요소로 구성됨.
- 기본 연산 (예를 들어 수학 연산들)
- 논리 흐름 컨트롤
- 외장 메모리 (연산의 결과를 쓰고 읽음)
- 튜링 머신은 현재 컴퓨터 구조의 기본 모델이라 생각할 수 있다.
- 이 구조를 차용하여 신경망 모델로 확장할 것이다.
- \(RNN\) 은 딥러닝 모델 중 아주 성공적인 모델 중 하나이고 시간 \(t\) 를 기반으로 하고 있음.
- 사실 이러한 RNN 이 Turing-Complete 하다는 사실이 이미 알려져있음. (Siegelmann & Sontag, 1995)
- 따라서 튜링 머신으로 \(RNN\) 을 흉내낼 수 있다.
- 뉴런 튜링 머신이 기존 튜링 머신과 다른 점은 \(GD\) (gradient descent) 를 사용하여 학습이 가능하다는 점이다.
-
앞으로 뉴럴 튜링 머신 (Neural Turing Machine) 을 줄여 \(NTM\) 이라 표기하도록 하자.
- RNN
- \(HMM\) 과 비슷하게 Sequence 모델이지만 \(HMM\) 보다 더 크기가 충분한 메모리 및 연산량을 가짐.
- 그리고 최근에는 \(LSTM\) 이 좋은 성능을 내고 있음. (Hochreiter & Schmidhuber, 1997)
- 문제는 vainshing & exploding 문제를 가지고 있다는 것.
- 그래서 긴 Sequence 를 가지는 문제를 잘 해결하지는 못한다.
- 여기서 이러한 이야기를 하는 이유는 \(NTM\)이 이러한 문제를 더 잘 해결하고 있기 때문.
NTM (a.k.a Neural Turing Machine)
- \(NTM\) 은 2개의 컴포넌트를 가지고 있음. : 컨트롤러(controller) 와 메모리 (memory)
- 컨트롤러는 입력, 출력 버퍼(벡터)를 통해 메모리와 통신을 한다.
- \(NTM\) 은 기본 튜링 머신과는 다르게 입출력 연산을 통해 직접 메모리에 접근할 수도 있다.
- 그리고 이때 사용되는 연산의 내부 파라미터(weights)를 헤드 (head)로 취급하게 된다.
- 모든 컴포넌트들은 미분 가능한 함수로 구성된다.
- 그래야 \(GD\) 를 사용할 수 있다.
- 그리고 “blurry” 라고 정의한 (어떤 영국 밴드가 떠오른다) 읽기, 쓰기 기능으로 메모리와 반응하는 범위를 만들어 낼 수 있다.
- 보통 일반적인 튜링 머신에서는 주소 찾기 (addressing) 과정으로 이를 처리하게 된다.
- 전체적인 도식은 다음과 같다.
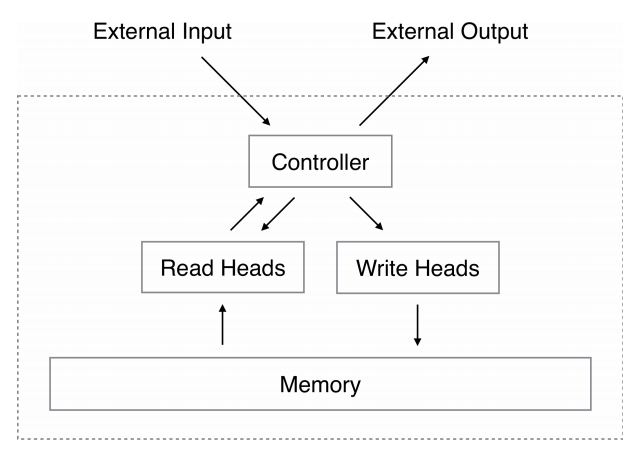
- 그리고 이 때의 controller 는 신경망으로 구성된다.
- 이제 구성 요소들을 하나씩 살펴보도록 하자.
Memory
- 메모리는 그냥 우리가 알고 있는 메모리와 개념이 같다.
- 하지만 좀 더 간단하게 Matrix 로 표현됨.
- 기본 구조는 다음과 같다.
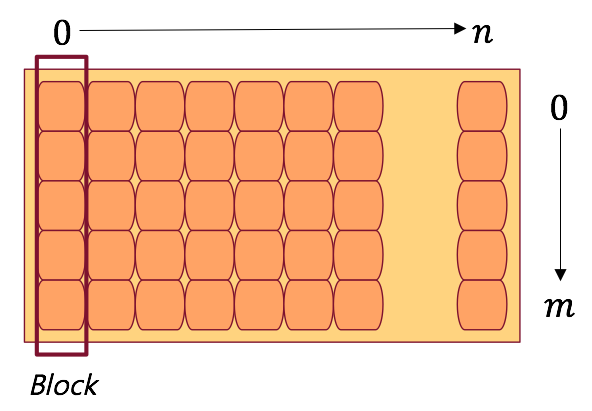
- 한 메모리 내에 의미있는 정보는 블록 (Block) 단위로 나누어진다.
- 현재 메모리 크기는 \(n\) 이고 블록 크기는 \(m\) 으로 정의한다.
- 읽고 쓰는 메모리 단위는 Block 단위가 된다.
Reading
- 이제 메모리 읽기 연산 read 를 정의한다.
- 보통의 경우라면 헤더에 메모리 주소를 저장한 뒤 데이터를 바로 읽어내는 과정으로 작성되겠지만 \(NTM\)은 (당연히) 다르다.
- 시간 \(t\) 일 때 어떤 정보들을 담고있는 상태의 메모리를 \(M_t\) 라고 정의힌다.
- 이 메모리의 크기는 \(N \times M\) 으로 정의된다.
- 이제 weight 벡터 \({\bf w}_t\) 를 추가한다. 이는 시간 \(t\) 일때 읽어야할 메모리 주소 헤더를 반환해주는 벡터가 된다.
- 이 때의 \({\bf w}_t\)는 다음의 조건을 가진다. (이 때 \(i\) 는 메모리 row 인덱스를 의미하게 된다.)
- 블록 크기가 \(M\) 인 메모리로부터 실제 읽은 정보를 담는 벡터를 \({\bf r}\) 벡터로 정의한다.
-
이 벡터는 인덱스 \(i\) 위치의 메모리 블럭 \(M_t(i)\) 와 convex 결합으로 구성되는 크기 \(M\) 의 벡터로 정의된다.
\[{\bf r}_t \leftarrow \sum_{i} w_t(i)M_t(i)\qquad{(2)}\] - 말로 설명하면 어려운데 그림으로 보면 좀 쉽다.
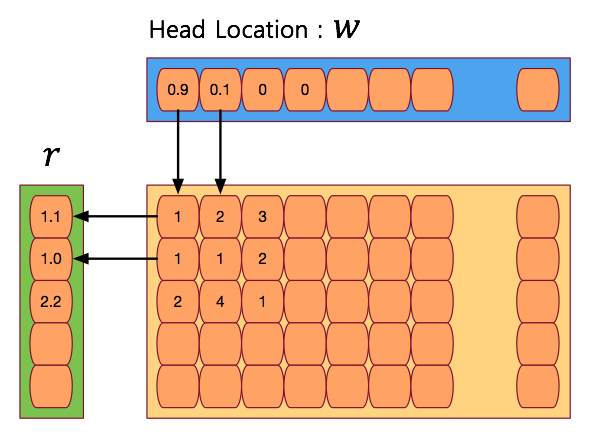
- 그림을 보면 알 수 있듯 \(w_t(i)\) 값이 높은 메모리 블록의 정보들을 많이 반영하여 얻어진 값을 최종 값으로 사용한다.
Writing
- \(LSTM\) 으로부터 얻은 영감을 write 연산에 적용해본다.
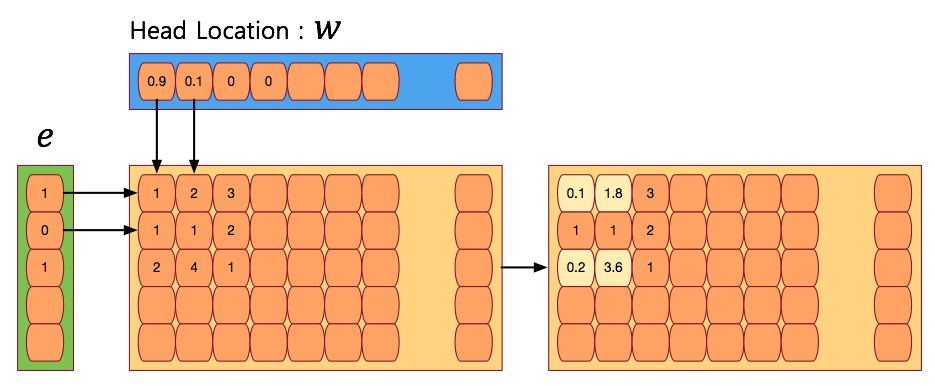
- 즉, 쓰기 작업을 erase 와 add, 두 개의 작업으로 분리하여 생각할 것이다.
- 시간 \(t\) 에 write 용 헤드가 출력하는 weight 를 \({\bf w}_t\) 라 하자.
- 그리고 이 때 삭제를 위해 사용되는 erase 벡터 \({\bf e}_t\) 도 정의한다.
- 이 벡터의 값은 \(0\) ~ \(1\) 사이의 값만 넣을 수 있다. (실수값이다.)
- 현재 time step 의 바로 전 step 의 메모리 상태를 \(M_{t-1}\) 라 한다면 삭제 연산을 다음과 같이 정의한다.
- 만약 erase 벡터 \({\bf e}\) 가 모두 \(1\) 을 가진다면 결국 \(w\) 값 중 큰 값을 가진 메모리가 0에 가까운 값을 가지게 된다. (삭제 효과)
- 역시나 말로 하면 이해가 잘 안되므로 그림으로 살펴보자.
- 최종 결과는 메모리에 저장됨을 확인하자.
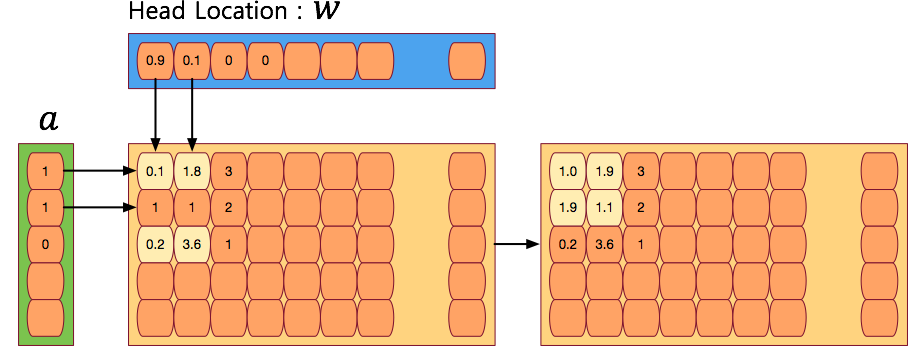
- 이제 add 연산을 보도록 하자.
- 당연히 삭제와 비슷하게 add 용 벡터 \({\bf a}\) 가 추가된다.
Addressing Mechanisms
- 지금까지 메모리에 데이터를 읽고 쓰는 방법을 살펴보았다.
- 이제부터는 어떻게 주소를 지정할 수 있는지를 살펴 볼 것이다.
- 주소를 지정하기 위해 필요한 것은 무엇인가?
- 앞서 살펴본 읽기, 쓰기 작업에서 힌트가 나오기는 했는데 실제 주소를 접근하는데 사용되는 요소는 바로 벡터 \({\bf w}\) 이다.
- 즉, \({\bf w}\) 의 값을 변화시켜 주소를 지정하게 된다.
- 이를 어떻게 지정할지를 알아봐야 하는데 메모리 접근 방식과 마찬가지로 아주 일반화된 형태로 \({\bf w}\) 값을 만들어낼 수 있는 방법을 제안한다.
- 힌트를 주자면 이후 목적에 맞게 이러한 \({\bf w}\) 값을 학습하게 될 것이다.
- \({\bf w}\) 의 값을 정하는 방법에는 두 가지 관점이 포함되어 있다.
- content-based addressing
- location-based addressing
- content-based addressing
- 이 방식은 신경망에서 Hopfield 가 제안한 방식(1982년)이다.
- 이 방식은 매우 간단한 방식으로 동작한다.
- 우리가 찾고자 하는 값의 위치를 아주 간단한 방법들 통해 대락적인 근사 값으로 반환해준다.
- 하지만 모든 주소 지정 방식을 content-based addressing 로 풀 수 있는 것은 아니다.
- location-based addressing
- 앞서 설명을 했듯 모든 주소 지정 방식을 content-based addressing 로만 해결할 수 있는 것은 아니다.
- 예를 들어 수치 연산과 관련된 문제들을 살펴보자.
- 두개의 변수 \(x\) 와 \(y\) 가 있다고 하고 연산 \(f(x, y)=x \times y\) 를 정의한다.
- controller 가 이 연산을 수행하고자 하면 두 개의 변수 값을 메모리에 읽어와 결과를 반드시 어느 메모리 공간에 기록해야 한다.
- 실수 값의 영역은 매우 크고, 실제 결과 또한 결정적인 수치 값이므로 content-based addressing 방식으로는 처리가 어렵다.
- 사실 이러한 방식은 내재된 content 를 사용하는 작업이 아닌 메모리 저장 위치인 location 에 제약을 가지는 작업이기 때문이다.
- 결론적으로 보면 content-based addressing 는 location-based addressing 보다는 좀 더 일반화된 주소 지정 방식이라 이야기할 수 있다.
- 왜냐하면 content-based addressing 내에 location-based addressing 방식을 포함시킬 수 있기 때문이다. (반대는 불가능하다.)
- 우리는 이러한 방식을 채택하여 location-based addressing 도 가능한 content-based addressing 방식을 사용할 것이다.
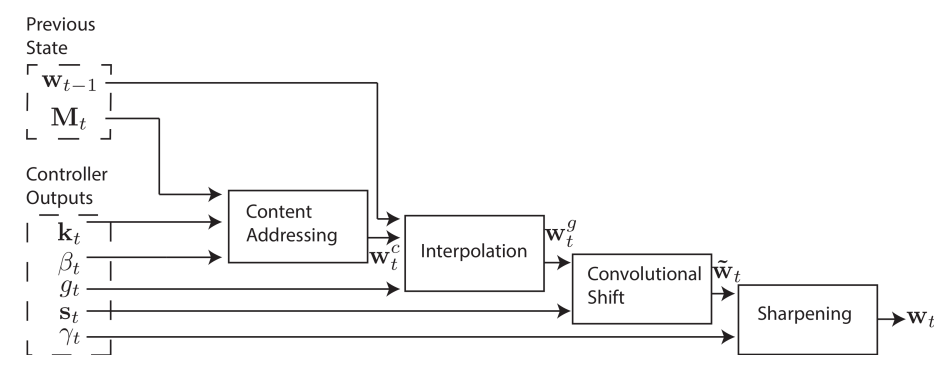
- 위의 그림은 \(NTM\) 한 step에서 다음 step으로 전환시 찾아 갈 주소 값을 만들 수 있는 식을 도식화한 그림이다.
- 결국 이전의 메모리 \(M_{t-1}\)와 \({\bf w_{t-1}}\)를 이용하여 위의 특정 연산들을 수행하면 다음 주소를 얻을 수 있도록 하기 위한 \({\bf w}_t\) 를 만들 수 있다는 이야기.
- 특정 연산들이 바로 content 와 location 주소 지정 방식을 가능케 하는 열쇠.
- 당연히 연산 사이에 들어간 weight 들은 이후 입력 데이터를 통해 학습하게 될 파라미터가 된다.
- 막연히 생각해보자면 \(RNN\) 과 동일한 작업을 하게 될 것인데 \(RNN\) 에서는 과거의 정보를 hidden 레이어로 넘겼다면 \(NTM\) 에서는 메모리에 저장을 하게 될거란 이야기.
- 게다가 정확한 값을 기억하는 것이 아니라 신경망의 특성을 이용하여 embedding 된 정보로 저장을 하게 될 것이다.
- 이제 주소 지정을 위한 각각의 연산들이 무엇을 의미하는지 살펴보도록 하자.
Focusing by Content
- content 주소 지정 방식을 먼저 설명한다.
- 앞서 간단히 개념을 언급하긴 했지만 centent 주소 지정 방식이란 어떤 입력 값을 넣어 그 값을 저장하고 있는 주소 값을 반환하는 작업을 의미한다.
- 물론 이를 통해 얻어지는 주소 값을 이용해 실제로 값을 메모리에서 읽어오면 이 값은 원래 입력 값과 정확히 일치하는 값이 아니라 근사값을 얻게 된다.
- 이게 바로 content-based addressing 를 의미하는 것이다.
- 신경망에서 auto-encoder 같은 걸 떠올리면 좀 더 쉽게 이해가 될 것이다.
- 이를 어떻게 구현할 수 있는지 식을 살펴보자.
- 식만 봐도 그냥 softmax 임을 알 수 있다.
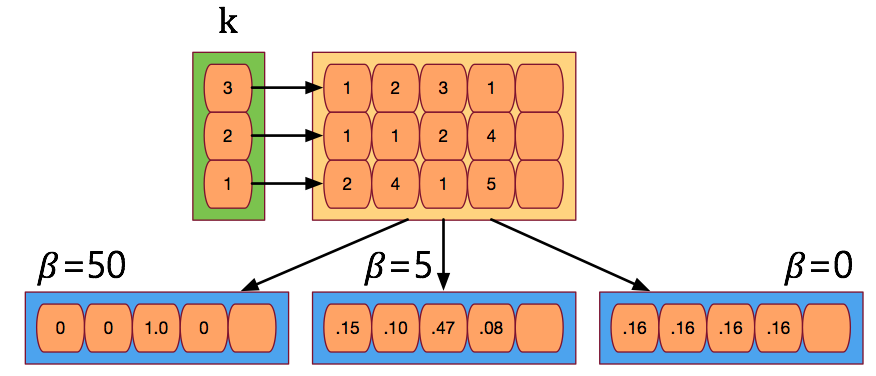
- 먼저 길이가 \(M\) 인 키(key) 벡터 \(k_t\) 가 주어지면 이를 유사도 측정 함수인 \(K\) 함수에 대입하여 \(w_t^c\) 를 구하게 된다.
- 유사도 함수 \(K\) 는 그냥 코사인(cosine) 유사도 함수이다.
- 결국 의미하는 바는 키(key) 벡터 \(k_t\) 를 메모리와 비교하여 코사인 유사도가 높은 위치에 높은 확률 값을 부여하는 형태.
- 이 때 추가적으로 \(\beta_t\) 를 사용하는데 이 값을 적절히 조절하면 확률 강도(퍼짐 정도)를 조절할 수 있다.
Focusing by Location
- 앞서 이야기한대로 어떤 작업의 경우 단순히 location 방식의 주소 지정 방식으로 처리를 해야할 경우가 있다.
- 그리고 메모리 위치에 접근하는 작업은 반복적으로 접근하는 방법과 랜덤한 접근 둘 다 가능하도록 구현되어야 한다.
- 일단은 현재 접근하는 메모리 위치에서 1만큼 오른쪽으로 (혹은 왼쪽으로) 이동한다던가 하는 작업을 할 수 있어야 한다.
- 하지만 이미 우리는 앞 단계에서 content 정보로 주소 지정을 하는 기능을 사용하고 있다.
- 따라서 location 을 위한 주소 지정 방식을 사용하기 위해서는 content 와 location 을 선택할 수 있는 방법이 필요하다.
- 다음과 같은 과정을 추가하여 두 과정을 적절히 선택할 있도록 한다.
- 여기서 \(g_t\) 는 게이트를 의미한다. 게이트는 \(0\) ~ \(1\) 사이의 실수 값을 가진다.
- \({\bf w}_t^c\) 는 이전 content 연산을 통해 얻어진 주소 값이다.
- \({\bf w}_{t-1}\) 는 이전 step 의 \({\bf w}\) 값을 의미한다.
- 만약 게이트 \(g_t=0\) 인 경우에는 앞서 사용한 content 정보를 전혀 사용할 수 없게 된다.
- 따라서 \(g_t=0\) 인 경우 이전 step 에 사용되었던 주소 값이 그대로 전달되게 된다.
- 반대로 게이트 \(g_t=1\) 인 경우에는 content 를 위한 주소 정보만 사용되고 이전에 담겨 있던 값은 의미가 없어진다.
- 이 과정을 interpolation 이라 한다.
- \(\{0,1\}\) 값 중에 하나를 선택하는 것이 아니라 실수 값을 선택한다.
- 그런 이유로 interpolation 이라는 용어가 사용된다. 따라서 이 둘의 결과를 섞을 수도 있다.
- \(LSTM\) 에서 사용되던 게이트들을 생각해보자.
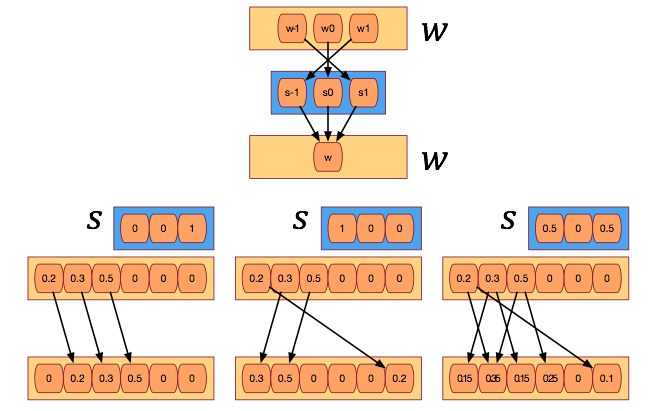
- 이제 shift weighting 을 살펴보도록 하자.
- 이 작업은 주소 값을 좌 혹은 우로 이동을 할 수 있는 연산이다.
- 이를 위한 변수로 \({\bf s}_t\) 를 제공한다.
- \({\bf s}_t\) 는 시작과 끝 값을 가지는 벡터로 구성되며 현재 위치에 대한 상대 인덱스가 저장된다.
- 그리고 그 크기는 그 사이의 정수 개수만큼 된다.
- 예를 들어 시작 값이 \(-1\) 이고 끝 값이 \(1\) 인 경우 \(\{-1, 0, 1\}\) 인 요소들을 가지게 된다.
- 실제 값을 만들어내는 가장 쉬운 방법은 softmax 를 사용하는 것이다.
- 사실 다른 방법도 실험을 해보긴 했다. 예를 들어 특정 실수 값을 출력하여 이를 이용하여 \(s_t\) 값을 만들어봤다.
- 예를 들어 controller 가 예측한 이동 값이 \(6.7\) 이라면 \(s_t(6) = 0.3\) , \(s_t(7)=0.7\) 로 하고 나머지 값은 모두 0으로 등.
- 사실 다른 방법도 실험을 해보긴 했다. 예를 들어 특정 실수 값을 출력하여 이를 이용하여 \(s_t\) 값을 만들어봤다.
- 그림을 보면 쉽게 이해할 수 있다.
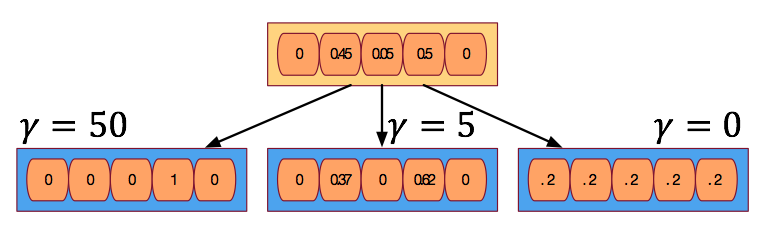
- 식(8) 을 통하게 되면 약간 문제가 있는데 확률적인 비율로 값이 분배되는 효과가 있기 때문에 특정 주소를 딱 집어야 하는 경우에는 좀 맞지 않을 수 있다.
- 이를 보정하기 위해 sharping 과정을 추가한다.
- 확률이 더 높은 위치의 값을 boosting하는 효과를 가진다.
- 물론 값을 어떻게 조정하느냐에 따라 값을 더 뭉갤수도 있다.
Controller Network
- 지금까지 여러 파라미터 값들을 제어하여 \(NTM\) 을 동작하는 것을 확인했다.
- 위의 작업들을 조합하면 메모리 읽기, 쓰기, 주소 지정 동작을 수행할 수 있다.
- \(LSTM\) 의 경우 모델 내에 메모리를 유지하면서 동작을 하게 되는데 동일하지만 \(NTM\)을 이용하면 외부에 메모리를 두는 형태로 구현이 가능하다.
- 실험을 통해 \(RNN\) 으로 작업했던 일들을 \(NTM\) 으로 동작해보고 더 좋은 성능을 얻을 수 있음을 확인해보도록 하겠다.
Experiment
- 여기서는 아주 기본적인 작업에 대한 실험만을 진행해 볼 것이다.
- 데이터를 복사하는 작업
- 데이터를 정렬하는 작업
- 모든 실험에는 다음 세 가지 모델을 사용한다.
- feedforward 방식을 사용하는 \(NTM\) controller
- \(LSTM\) 을 사용하는 \(NTM\) controller
- 그냥 \(LSTM\)
Copy
- 여기서는 아주 긴 시퀀스를 가지는 데이터 구조를 복사하는 실험을 할 것이다.
- 사실 이런 문제는 \(RNN\) 에서 많이 다루어졌다.
- 실험 환경
- 입력값은 랜덤한 이진 벡터의 시퀀스이다. (8bit)
- 길이는 랜덤하게 \(1\) ~ \(20\) 사이의 값을 가진다.
- 시퀀스의 마지막 입력은 구분자(delimiter)를 사용.
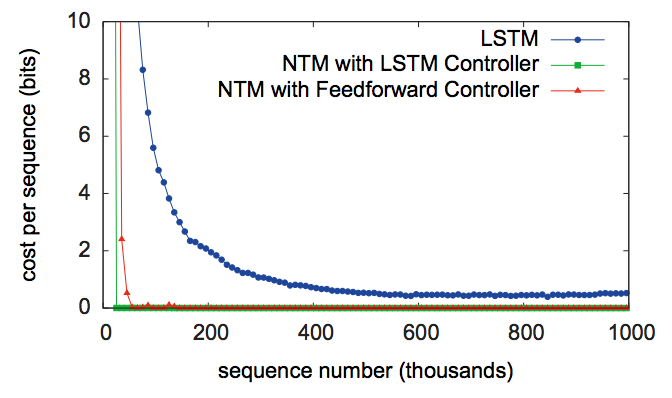
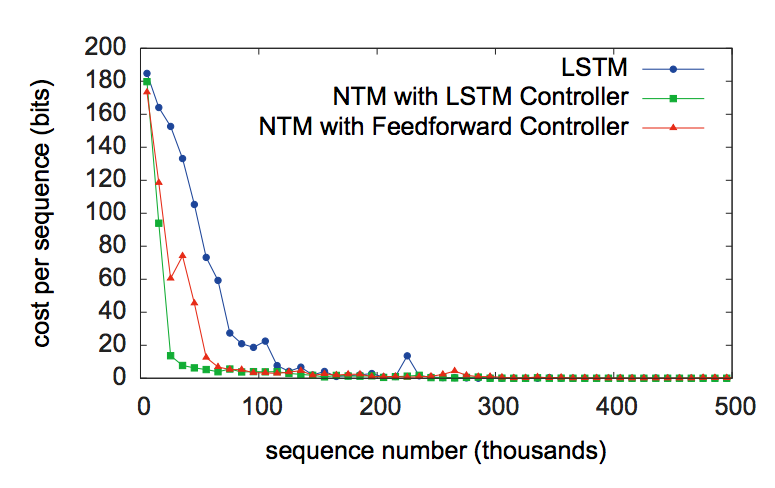
- 위의 그림은 \(NTM\) 이 \(LSTM\) 을 단독으로 사용하는 것보다 훨씬 빠르다는 것을 보여주는 지표이다.
- 시퀀스 길이를 늘려가면서 단위 시퀀스당 비용을 보여준다. (근데 cost의 의미를 모르겠다. 시간인가?)
- 게다가 더 긴 시퀀스에 대해서도 \(NTM\) 이 더 잘 학습한다는 것을 알 수 있었다.
- \(NTM\) 은 \(LSTM\) 과 다르게 완전하게 복사하는 알고리즘을 학습하고 있다는 사실을 알 수 있다.
- 이를 확인하기 위해서 우리는 학습된 상태에서 controller 와 memory 사이의 작업 과정을 분석하였다.
- 대충 아래와 같은 방식으로 돌아가게 된다.
초기화 : 헤드를 시작 위치로 옮긴다.
while 구분자(delimeter)가 아닐때 까지 반복 do
입력 벡터를 받음
입력 벡터를 헤더 위치에 기록
헤더의 위치를 1만큼 증가
end while
헤더 위치를 다시 맨 처음 시작 위치로 이동
while true do
헤더 위치로부터 출력할 벡터를 읽음
읽은 백터를 외부로 방출(emit)
헤더의 위치를 1만ㅊ큼 증가
end while
- 실험 결과를 살펴보자.
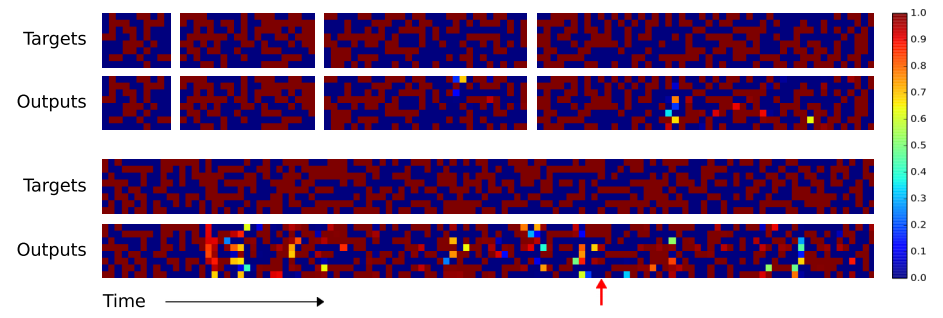
- 먼저 상단의 4개의 상자는 입력 길이가 각각 10, 20, 30, 50 인 시퀀스를 넣는 것을 의미한다. 바로 아래는 120 길이의 입력을 의미한다.
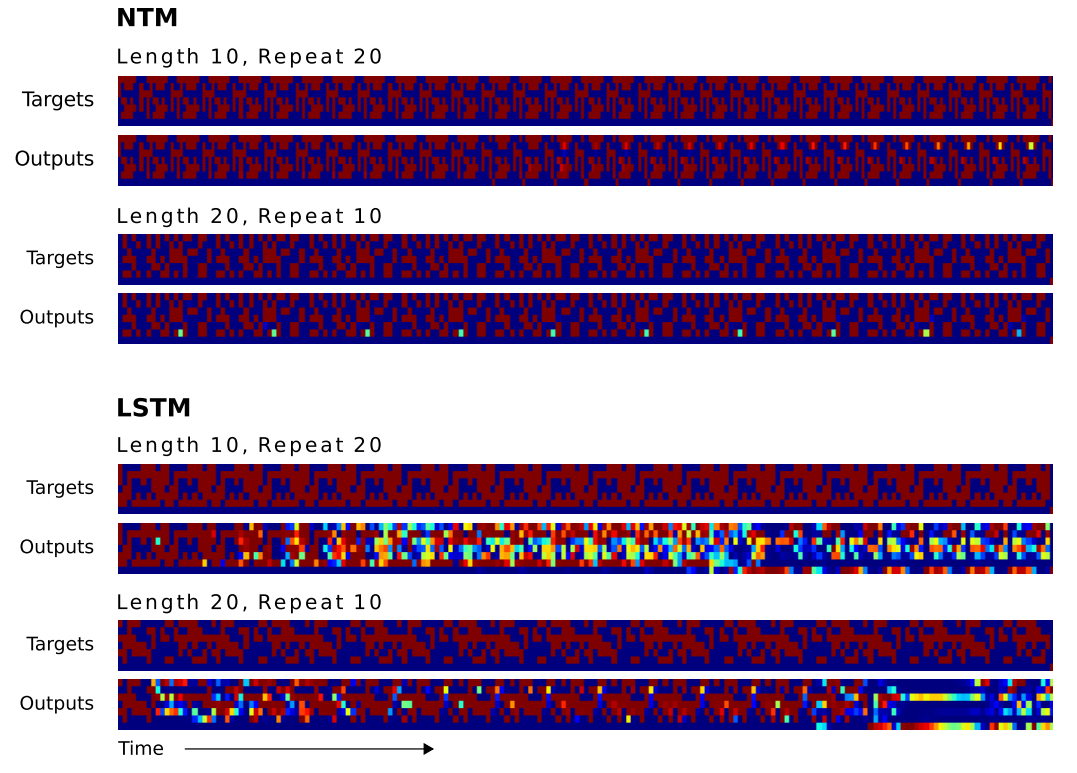
- 색상은 출력 값을 나타낸다. (1이면 붉은색, 0이면 파란색이고 그 사이의 값은 색상 스펙트럼으로 표현한다.)
-
길이가 20일 때까지는 100% 정확하게 동작한다. 50일 때까지도 꽤나 정확하게 동작한다는 것을 알 수 있다.
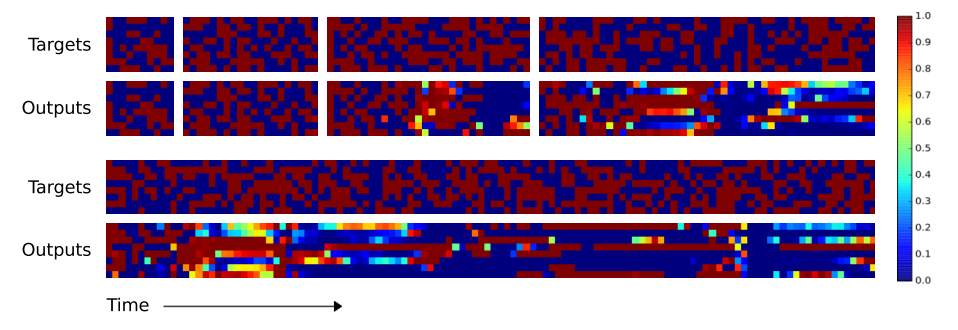
- 참고로 \(LSTM\) 의 결과는 어떤지 확인해보자.
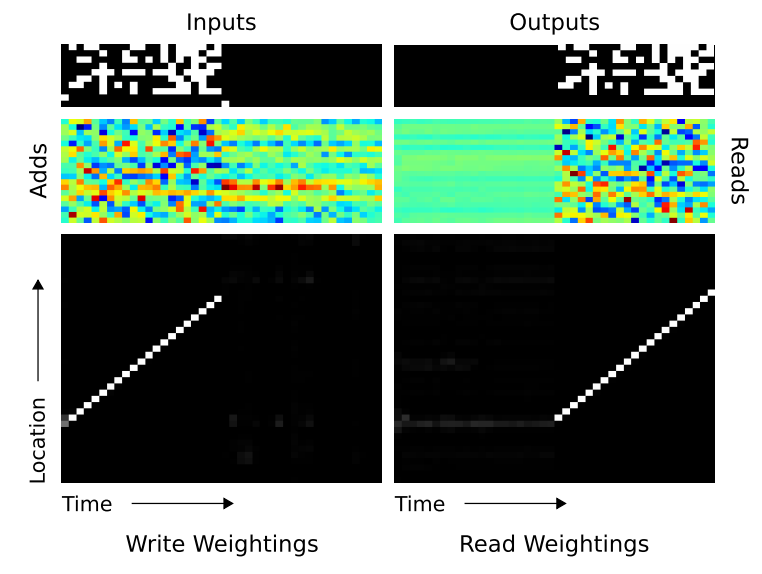
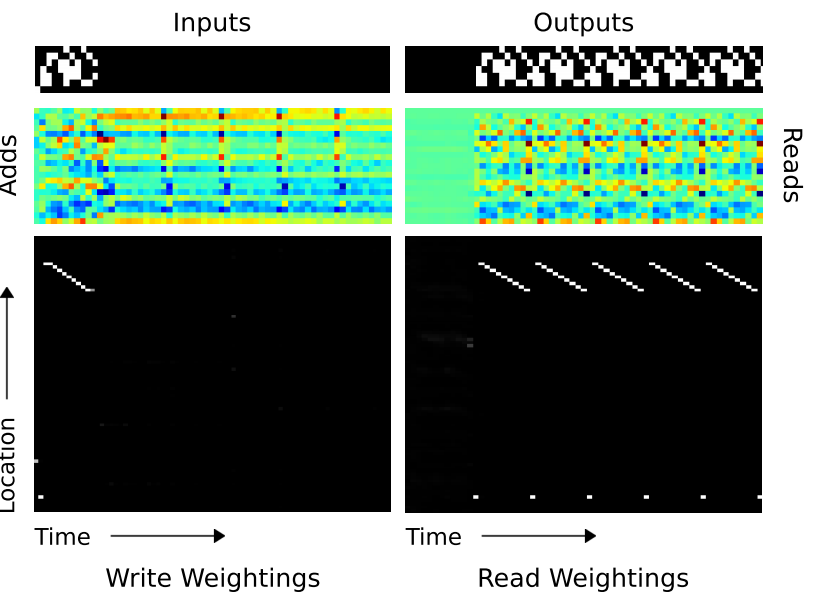
- \(NTM\) 이 복사 작업을 진행할 때의 add 메모리 값과 위치를 위한 \(w_t\) 벡터 값을 보도록 하자.
- \(w_t\) 의 경우 \(1\) 이 하얀색, \(0\)이 검은색으로 중간은 회색의 스케일을 가지게 된다.
Repeat Copy
- 반복 복사는 그냥 복사 기능을 확장한 것이다.
- 추가적인 기능으로 입력이 종료되는 시점부터 실제 복사가 발생되도록 구현한다. 그것도 원하는 만큼 \(n\) 회 반복 할 수 있다.
- 이를 통해 \(NTM\) 이 for loop 기능을 수행할 수 있는지를 알수 있다.
- 입력은 임의의 크기의 이진 시퀀스 데이터를 입력한 뒤 반복할 숫자를 입력한다.
- 이 때 입력할 숫자값은 이진 시퀀스 데이터와 같은 채널을 사용하지 않고 다른 채널을 사용하게 된다.
- 복사(Copy)와 마찬가지로 성능을 좀 보자.
- 실제 결과도 눈으로 보는게 가장 빠르다.
Associative Recall
- 앞에서 살펴본 알고리즘은 무척이나 간단한 알고리즘이다.
- 이제 좀 더 복잡한 문제들을 다루어보도록 하자.
- 진행
- 입력은 delimeter 를 이용하여 두 개의 데이터를 입력하게 된다. (두개의 delim 등장마다 하나의 요청 단위가 된다.)
- 입력은 6 bit 크기의 이진 데이터 3개를 하나의 묶음으로 하여 다른 sub delimeter 로 여러 개를 입력한다.
- 데이터가 6 bit 인 것은 실제로는 8 bit 데이터인데 2개를 delimeter 로 사용하기 때문이다.
- 이 때 첫번째 delim 입력이 끝나고 두번째 데이터를 입력하고 나면, 최종 출력은 첫번째 입력 내에서 두번째와 매칭되는 시퀀스를 찾아 그 다음 시퀀스를 출력해주는 것이 목표.
- 그냥 그림으로 보는게 이해가 빠르다.
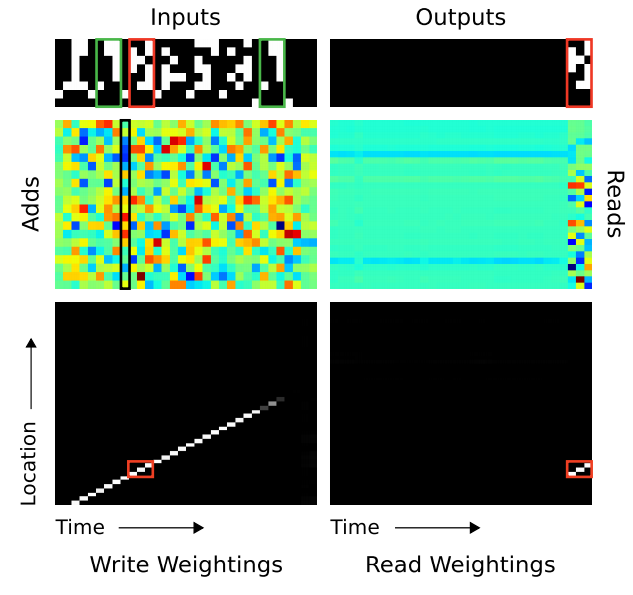
- 그림을 보면 3 bit 입력 후 sub-delimeter 를 확인할 수 있다.
- 그리고 최종 출력된 결과를 보면 정확히 원하고자 하는 위치 이후의 3 bit 가 출력됨을 확인할 수 있다.
Dynamic N-Grams
- n-gram 문제는 \(NTM\) 이 예측 분포 문제를 얼마나 빨리 적응하는지를 확인하는 예제이다.
- 말은 화려한데 그냥 어떤 분포를 통해 생성된 데이터들의 패턴을 파악하여 다음 값을 에측하는 문제이다.
- 굳이 n-gram 이란 용어를 쓴 이유는 이를 활용하면 전이 확률 정보를 메모리에 저장 하는 형태로 익히 알려진 N-gram 모델을 구현해 낼 수 있기 때문이다.
- 여기서는 이진 6-Gram 을 사용한다. 이 말은 앞의 5-bit 를 확인한 뒤 현재 bit 를 예측한다는 의미이다.
- 이 때의 확률 값을 다음과 같이 정의한다.
- 여기서 \(c\) 는 윈도우 크기로 현재 \(6\) 으로 설정되어 있다. (앞서 5개의 bit를 살펴봄)
- \(N_0\) 는 \(c\) 이내의 bit 중 \(0\) bit 인 경우를 의미하고, \(N_1\) 은 \(1\) bit 를 의미한다.

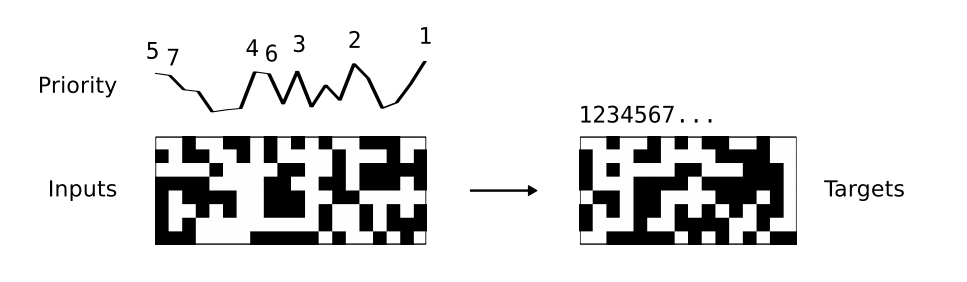
Priority Sort
- 마지막으로 정렬 알고리즘을 살펴본다.
- 랜덤하게 이진 데이터 벡터를 입력받아 이를 정렬한다. 이 때의 우선 순위는 균등하게 생성된다.
- 20개의 이진 데이터를 입력받은 뒤 (이 때 priority 도 함께 받는다.) 이 중 priority가 높은 순으로 16개의 이진 벡터를 출력한다.
- 크기를 16으로 제한한 이유는 \(NTM\) 이 깊이(depth) `4의 이진 힙소트 문제 처리가 가능한지를 확인하기 위해 사용되었기 때문이다.

- 뭐 결과는 이렇다는데 자세한 내용이 없어서 생략하도록 하자.
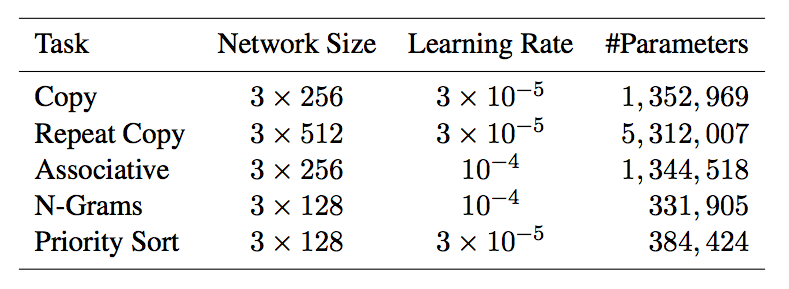
Experimental Settings
- \(NTM\) with Feeadforward
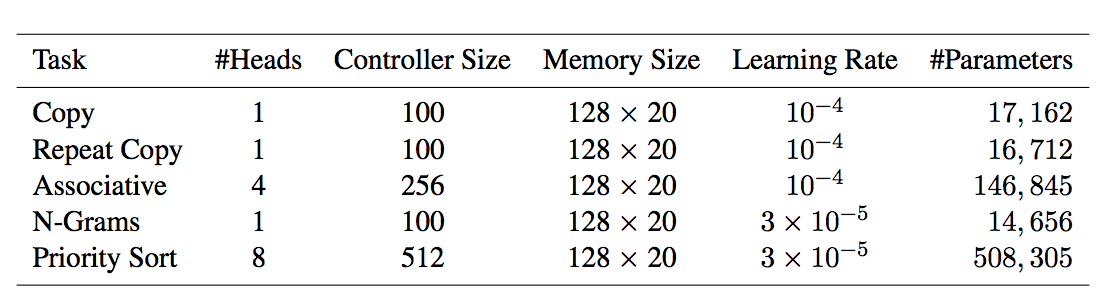
- \(NTM\) with \(LSTM\)
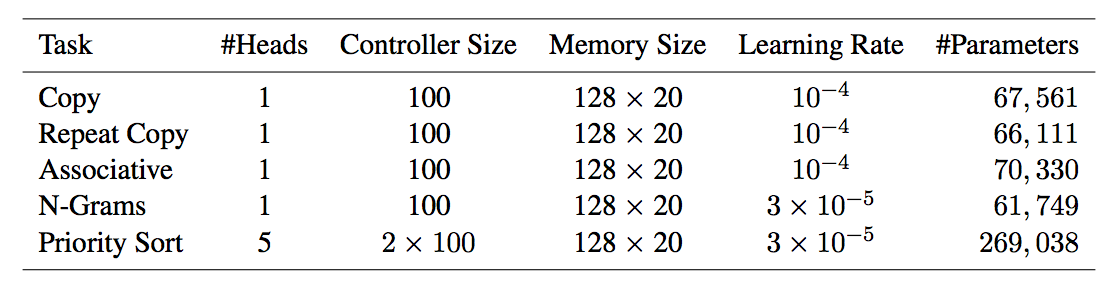
- \(LSTM\)